Rigid Body Components
Obtaining a RigidBodyComponent
An example using TypeScript:
const rigidBody = this.getComponent(RigidBodyComponent);
Rigid Body Types
Rigid bodies are generally divided into three types, static, dynamic, and kinematic.
- static, which means a static rigid body, like a stone with a huge mass, specifically a mass with a mass of
0, or only physical elements with collision components. - dynamic, which means that a dynamic rigid body can be subjected to forces, specifically those with a mass greater than
0andisKinematicbeingfalse. - kinematic, which means kinematic rigid body, the user controls the movement of the rigid body, specifically the mass is greater than
0andisKinematicistrue.
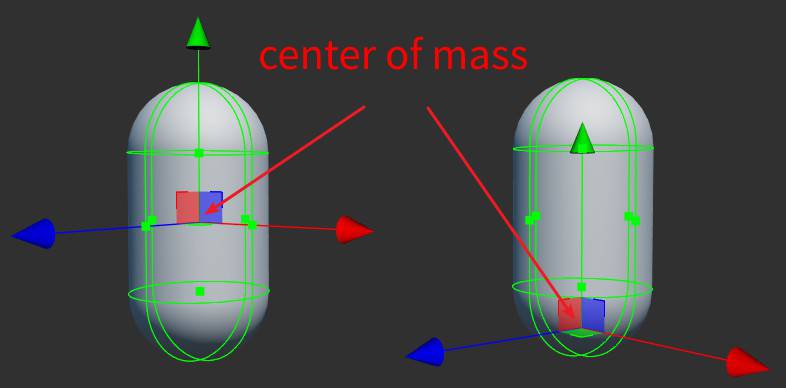
Center Of Mass
Currently the center of mass is fixed to the node to which the rigid body component is bound, and the center of mass is relative to the collider shape. By adjusting the collider shape offset (center), the center of mass can be shifted in shape.
Note: In order to make it easier to fit collider shape to the model, methods for changing mass centers may be added in the future, as well as methods for dynamically calculating mass centers mechanism.
Sleeping And Waking a Rigid Body
An example using TypeScript:
if (rigidBody.isAwake) {
rigidBody.sleep();
}
if (rigidBody.isSleeping) {
rigidBody.wakeUp();
}
Allowing The Rigid Body To Move
To move a rigid body, you need to change the speed of the rigid body. Currently, there are several ways to change the speed of the rigid body:
By Gravity
The rigid body component provides the useGravity property, set it to true and the rigid body will be affected by gravity.
By Applying Force
The rigid body component provides an applyForce interface with the signature: applyForce (force: Vec3, relativePoint?: Vec3).
According to Newton's second law F = m * a, a force is applied to a certain point of the rigid body, so that there is acceleration, and the speed will change with the acceleration with time, which will cause the rigid body to move. Example:
rigidBody.applyForce(new Vec3(200, 0, 0));`
By Applying Torsional Force
The rigid body component provides the applyTorque interface with the signature: applyTorque (torque: Vec3).
Through this interface, you can apply torque to the rigid body, because it only affects the rotation axis, so no longer need to specify the point of action.
By Applying Impulse
The rigid body component provides the applyImpulse interface, with the signature: applyImpulse (impulse: Vec3, relativePoint?: Vec3).
According to the equation of conservation of momentum F * Δt = m * Δv, impulse is applied to a certain point of the rigid body. Since the mass of the object is constant, the speed will change immediately and the rigid body will move. Example:
rigidBody.applyImpulse(new Vec3(5, 0, 0));`
By Directly Changing The Speed
Linear speed
The rigid body component provides the setLinearVelocity interface, which can be used to change the linear velocity. The signature is: setLinearVelocity (value: Vec3).
Spinning speed
The rigid body component provides the setAngularVelocity interface, which can be used to change the rotation speed. The signature is: setAngularVelocity (value: Vec3).
An example using TypeScript:
rigidBody.setLinearVelocity(new Vec3(5, 0, 0));
rigidBody.setAngularVelocity(new Vec3(5, 0, 0));
Limit Movement Of Rigid Body
By Sleeping
When sleeping the rigid body, all the force and speed of the rigid body will be emptied, which will stop the rigid body.
Note: Currently application of force or impulse, and changing the speed will wake up the rigid body again, and subsequent adjustments may be made, please pay attention to the version update announcement.
By Damping
The rigid body component provides linearDamping and angularDamping properties, which are used to set linear and rotational damping, respectively.
The damping parameter can range from 0 to infinity, 0 means no damping, and infinite means full damping.
By Fixed Rotation
The rigid body component provides the fixedRotation property. The default is false. Setting it to true can be used to fix the rigid body so that it does not rotate.
By Factor
The rigid body component provides the linearFactor and angularFactor properties, which are used to set the linear and rotation factors, respectively.
The factor is the type of Vec3. The value of the corresponding component is used to scale the speed change of the corresponding axis. The default value is 1, which means that the scaling is 1 times, that is, no effect.
Note: Set a certain component value of the factor to
0, you can fix a certain axis of movement or rotation, if you want to completely fix the rotation, please usefixedRotation.
Continue to the physics event documentation.