2D 关节组件
物理系统包含了一系列用于链接两个刚体的关节组件。关节组件可以用来模拟真实世界物体间的交互,比如铰链,活塞、绳子、轮子、滑轮、机动车、链条等。学习如何使用关节组件可以创建一个真实有趣的场景。
注意:
- 关节组件在 Builtin 2D 物理模块中是无效的。
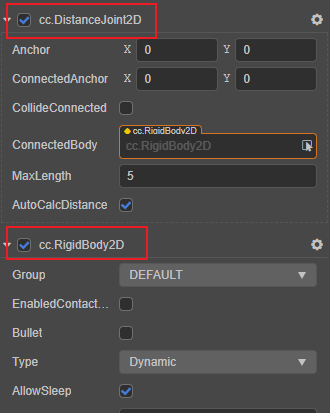
关节组件都需要搭配 刚体 才可以正确运行。如下图所示:
添加关节
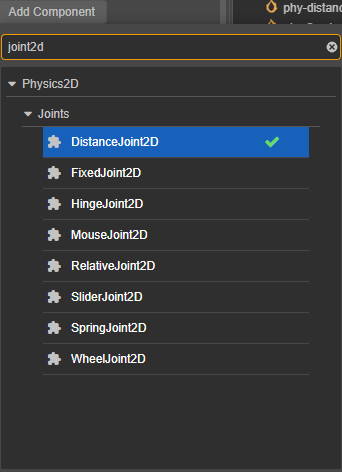
在 属性检查器 上点击 添加组件 按钮并输入 2D 关节的组件名。
关节的共用属性
虽然每种关节都有不同的表现,但是它们也有一些共同的属性:
| 属性 | 说明 |
|---|---|
| ConnectedBody | 关节链接的另一端的刚体 |
| Anchor | 关节本端链接的刚体的锚点 |
| ConnectedAnchor | 关节链接另一端刚体的锚点 |
| CollideConnected | 关节两端的刚体是否能够互相碰撞 |
每个关节都需要链接两个刚体才能够发挥它的功能,我们把和关节挂在同一节点下的刚体视为关节的本端,把 ConnectedBody 视为另一端的刚体。通常情况下,每个刚体会选取自身周围的某个位置设定成锚点。根据关节组件类型的不同,锚点决定了物体的旋转中心,或者是用来保持一定距离的坐标点,等等。
CollideConnected 属性用于确定关节两端的刚体是否需要继续遵循常规的碰撞规则。
如果你现在准备制作一个布娃娃,你可能会希望大腿和小腿能够部分重合,然后在膝盖处链接到一起,那么就需要设置 CollideConnected 属性为 false。如果你准备做一个升降机,希望升降机平台和地板能够碰撞,那么就需要设置 CollideConnected 属性为 true。
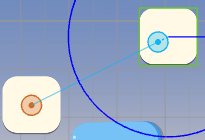
调整锚点
在场景中可以通过点击并拖拽  来调整 Anchor 属性,通过
来调整 Anchor 属性,通过  来调整 ConnectedAnchor。
来调整 ConnectedAnchor。
距离关节
在 属性检查器 上点击 添加组件 并输入 DistanceJoint2D 则可以添加距离关节。
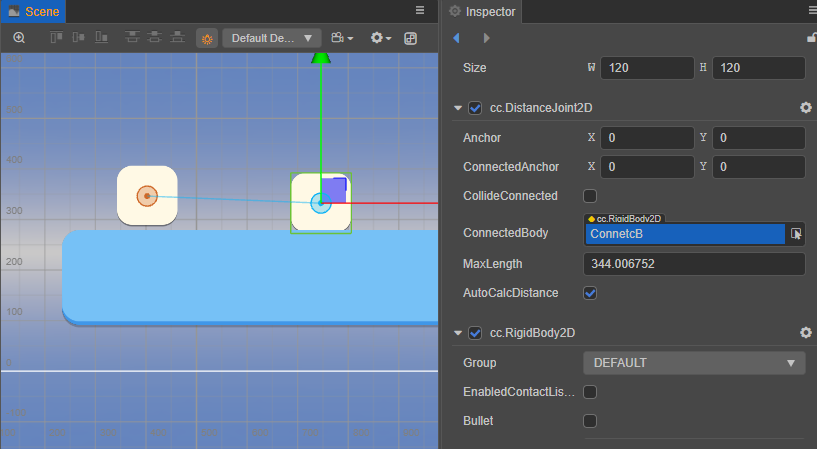
距离关节(Distance Joint) 会将关节两端的刚体约束在一个最大范围内。超出该范围时,刚体的运动会互相影响。
低于该范围则不会互相影响。
属性
| 属性 | 说明 |
|---|---|
| MaxLength | 最大距离 |
| AutoCalcDistance | 是否自动计算关节连接的两个刚体间的距离 |
固定关节
在 属性检查器 上点击 添加组件 并输入 FixedJoint2D 则可以添加固定关节。
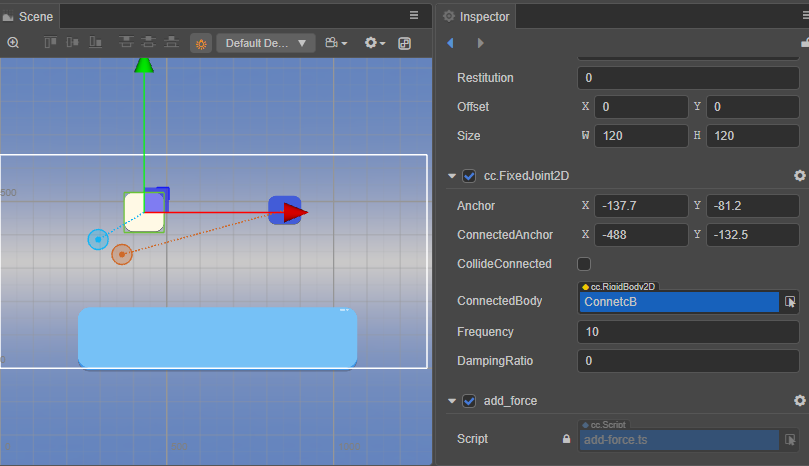
固定关节(Fixed Joint),根据两个物体的初始角度将两个物体上的两个点固定在一起。
属性
| 属性 | 说明 |
|---|---|
| Frequency | 弹性系数 |
| DampingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |
铰链关节
在 属性检查器 上点击 添加组件 并输入 HingeJoint2D 则可以添加铰链关节。
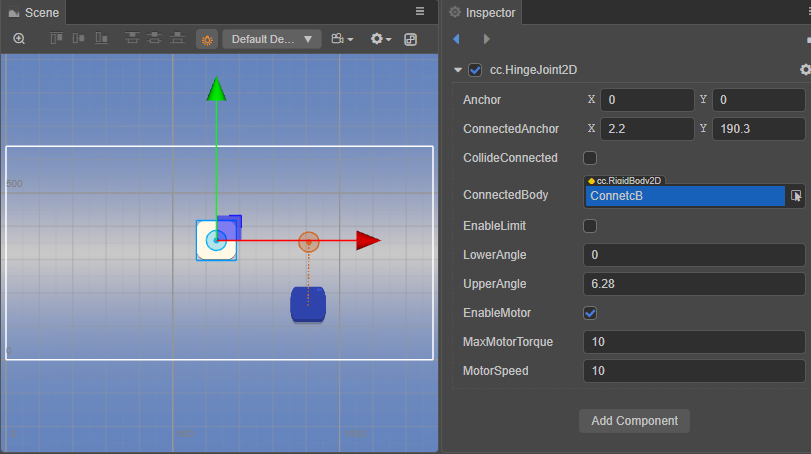
铰链关节(Hinge Joint),可以看做一个铰链或者钉,刚体会围绕一个共同点来旋转。
属性
| 属性 | 说明 |
|---|---|
| EnableLimit | 是否开启关节的限制 |
| LowerAngle | 角度的最低限制 |
| UpperAngle | 角度的最高限制 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorTorque | 可以施加到刚体的最大扭矩 |
| MotorSpeed | 期望的马达速度 |
启用马达速度后,关节连接的刚体会尝试逐渐加速到期望速度。
相对关节
在 属性检查器 上点击 添加组件 并输入 RelativeJoint2D 则可以添加相对关节。
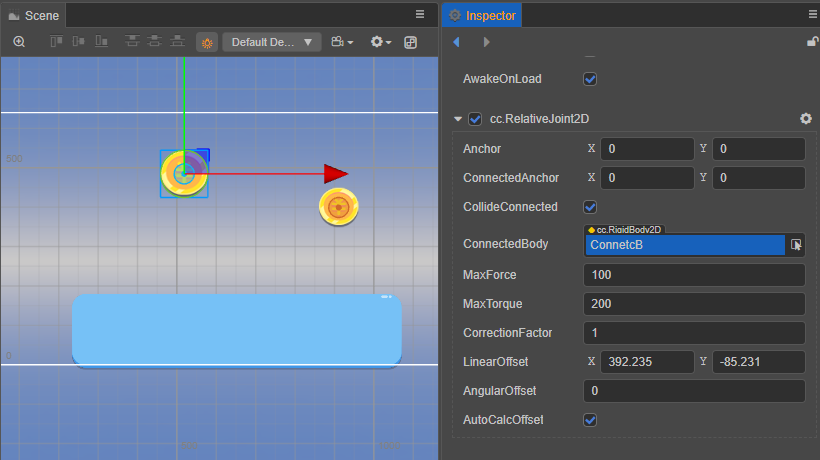
相对关节(Relative Joint),控制两个刚体间的相对运动。

属性
| 属性 | 说明 |
|---|---|
| MaxForce | 可以应用于刚体的最大的力值 |
| MaxTorque | 可以应用于刚体的最大扭矩值 |
| CorrectionFactor | 位置矫正系数,范围为 [0, 1] |
| LinearOffset | 关节另一端的刚体相对于起始端刚体的位置偏移量 |
| AngularOffset | 关节另一端的刚体相对于起始端刚体的角度偏移量 |
| AutoCalcOffset | 自动计算关节连接的两个刚体间的 angularOffset 和 linearOffset |
滑动关节
在 属性检查器 上点击 添加组件 并输入 SliderJoint2D 则可以添加滑动关节。
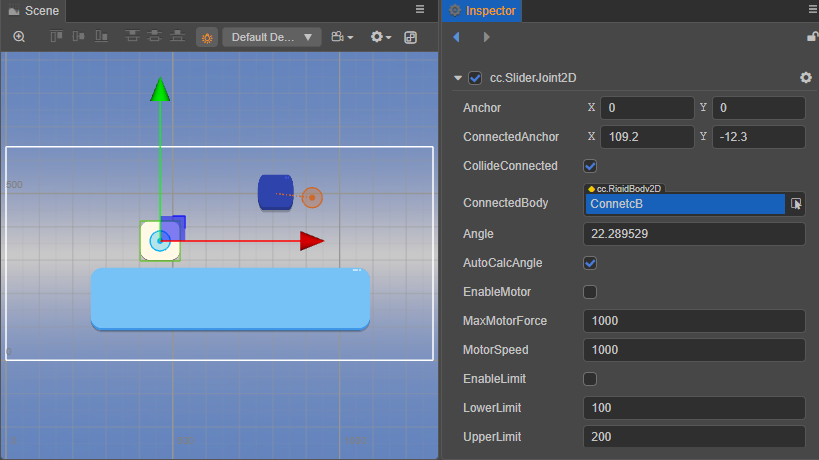
滑动关节(Slider Joint),两个刚体位置间的角度是固定的,它们只能在一个指定的轴上滑动。如下图蓝色方块虽然受重力影响,但实际上由于关节的约束,只能沿设定的方向运动。
属性
| 属性 | 说明 |
|---|---|
| Angle | 滑动的方向 |
| AutoCalcAngle | 根据连接的两个刚体自动计算滑动方向 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorForce | 可以施加到刚体的最大力 |
| MotorSpeed | 期望的马达速度 |
| EnableLimit | 是否开启关节的距离限制 |
| LowerLimit | 刚体能够移动的最小值 |
| UpperLimit | 刚体能够移动的最大值 |
弹簧关节
在 属性检查器 上点击 添加组件 并输入 SpringJoint2D 则可以添加弹簧关节。
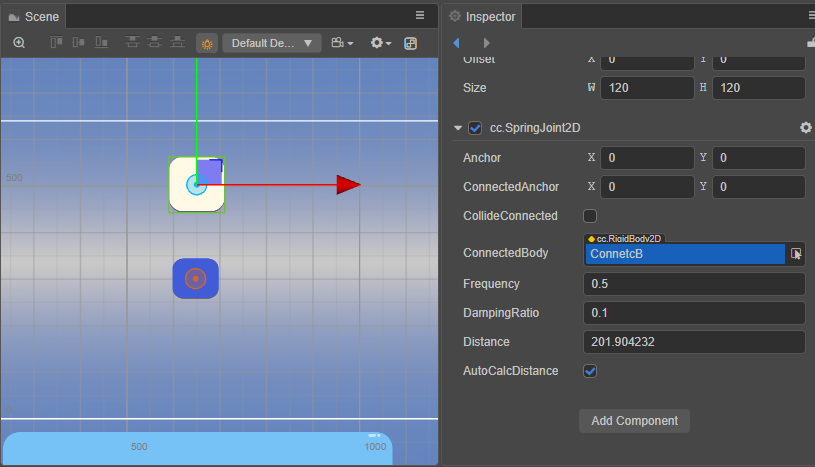
弹簧关节(Spring Joint),将关节两端物体像弹簧一样连接在一起。
属性
| 属性 | 说明 |
|---|---|
| Frequency | 弹性系数 |
| DamingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |
| Distance | 关节两端的距离 |
| AutoCalcDistance | 自动计算关节连接的两个刚体间的距离 |
轮子关节
在 属性检查器 上点击 添加组件 并输入 WheelJoint2D 则可以添加轮子关节。
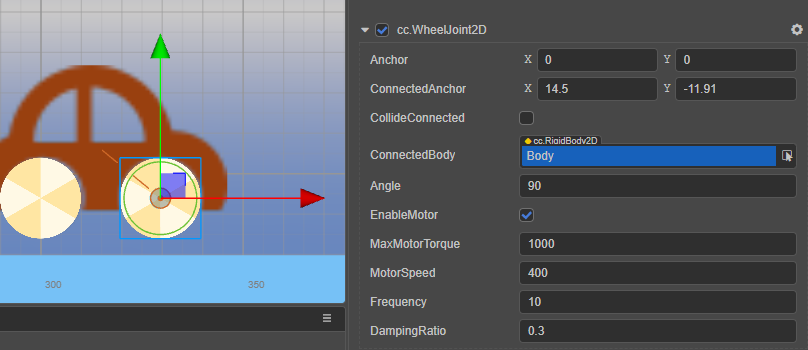
轮子关节(Wheel Joint),用于模拟机动车车轮。

在模拟现实中四驱的情况下,可以考虑将前后轮的轮子关节都启用 EnableMotor,而非四驱的情况下可以考虑只启用驱动轮的 EnableMotor。 图示中仅前轮开启了 EnableMotor,从而模拟前驱的情况。
属性
| 属性 | 说明 |
|---|---|
| Angle | 轮子震动方向 |
| EnableMotor | 是否开启关节马达 |
| MaxMotorTorque | 可以施加到刚体的最大扭矩 |
| MotorSpeed | 期望的马达速度 |
| Frequency | 弹性系数 |
| DampingRatio | 阻尼,表示关节变形后,恢复到初始状态受到的阻力 |