物理应用案例
射箭案例
用基础形状组合十字架——复合形状
下图中用两个盒形状组合一个十字架,节点上所有的碰撞体组合成了一个十字形状,这是实现带有凹面形状最基础的方法:
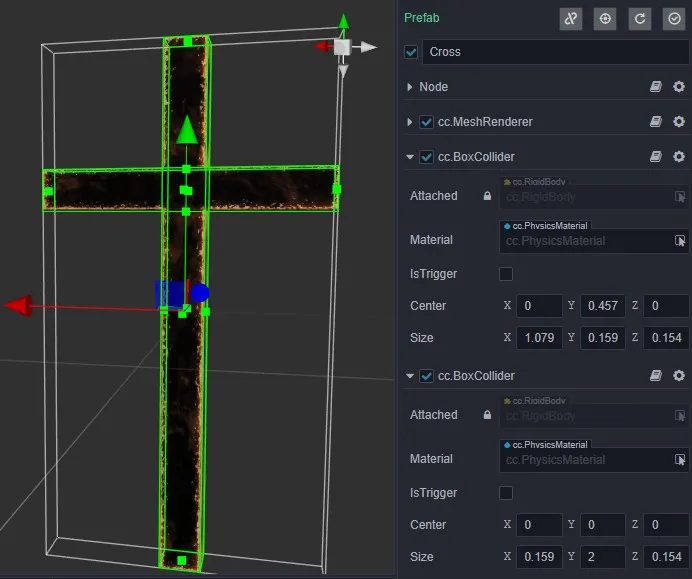
容易误用的地方是在多个节点中添加碰撞体拼凑出十字架后,希望它碰撞后可以保持整体结构进行运动,这在目前的结构中是无法做到的,只能往单个节点上添加碰撞体来实现。
射箭与回收箭——运动学、动力学、事件
射箭的第一步是拉弓,箭需要完全跟随弹性绳骨骼一起运动,不希望箭受到物理规则的影响,此时应将箭的刚体设置为
Kinematic类型;第二步是松开弹性绳发射箭,这时希望给箭设置初速度后,可以按照物理规则进行运动,因此将箭的刚体设置为Dynamic类型。
回收箭的大致过程是在箭射出去后,一旦触碰到触发区域就将其还原到弓上。这可以通过制作监听区域来实现,首先利用碰撞体组件拼凑出区域,同时将碰撞体组件的
IsTrigger勾选上(下图中的地面,也就是蓝框圈出的部分为监听区域)。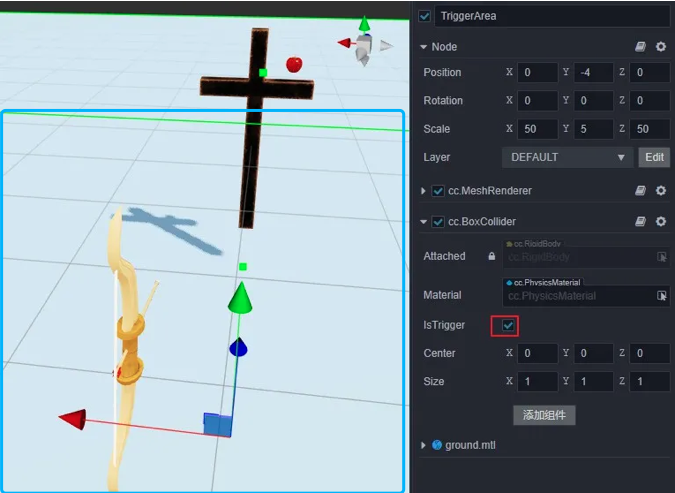
上述容易产出错误的地方有:
希望修改变换信息来操作动力学(Dynamic)类型的刚体运动,应当通过速度、力或冲量等物理层的数值来控制。
利用静态(Static)类型的刚体来监听事件,静态刚体只会和带有类型为运动学或动力学的刚体产生事件。如果两者都为静态,则不产生事件。
监听事件时仅监听了触发开始(OnTriggerEnter),但是误以为包括了触发保持(OnTriggerStay)和结束(OnTriggerExit)。
瞄准——碰撞矩阵(过滤检测)、射线检测、静态平面
瞄准是射箭前的步骤,准心处于箭头指向所在的射线上,在十字架前面加一个静态平面碰撞体,然后利用射线检测就可以得到准心的位置。
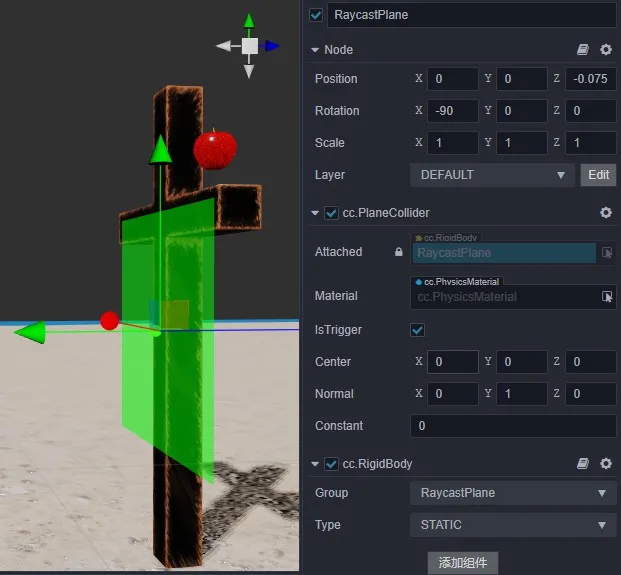
静态平面只是用来做射线检测,给它专门建立一个分组,并且不与箭、苹果等等物体进行检测,这是最通用的性能优化方法。
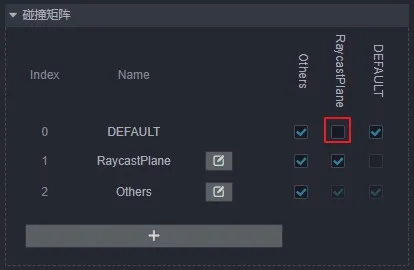
调用射线检测方法时,设置传入掩码为仅和静态平面检测,即
0b10(二进制表示法)。上述容易产出错误的地方有:
分不清刚体组件上的分组和节点上的层。这两者的概念类似,但是使用者不同,分组的使用者是物理模块,层的使用者是渲染模块。
对掩码的理解不到位,不知传何值。这里提供一个小技巧,以一个能够筛选出
Others的掩码举例,首先Others的index值为2,哪么只要让二进制掩码从右往左的顺序第2位为1,就能让Others通过筛选,也就是ob100(这里强烈建议不要随便更改分组的索引)。误认为射线检测接口的返回值是击中的数据。获取结果有专门的接口,此处设计是为了强调这是个复用对象。为了减少垃圾内存,每次调用接口只会更新它们的数据,而不是重新生成新的(若需要持久记录,哪么可以克隆一份)。
射击苹果——静态网格、凸包、多步模拟(步长调整)
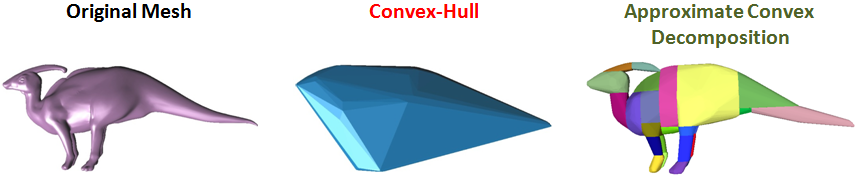
一般的苹果都带有凹面,处理好凹类或带连续平滑不规则曲面的模型都非常棘手,这是因为目前成熟的理论和技术都建立在离散、凸包的世界之上(微积分中用差分近似表示微分就是最典型的范例)。
在实时物理引擎中,对于这类物体只能支持到静态或运动学类型的刚体层级,对于动力学就束手无策了。然而不幸的是,真实的苹果运动表现强烈依赖动力学,这种情况只能给苹果填加凸包形式的网格碰撞体(需将 convex 勾选上),再加上一个动力学刚体,用近似物体去参与模拟。
运动表现与模拟参数有非常大的关系,穿透是最具有代表性的现象,这可以通过缩减步长和增加步数来实现,调整步长有个小技巧:输入分式,即
1/Frame,其中Frame表示帧率。
上述容易产出错误的地方有:
在带有未勾选
convex的网格碰撞器上添加了的动力学刚体,与其它物体产生了穿透现象,或者说完全没有反应,这是典型的错误使用,只有勾上convex的才能支持动力学刚体。对一个顶点数极多的模型开启了
convex,过多的顶点数会使凸包的面数增多,这对性能有很大的影响,而且实际上并不需要面数特别多的凸包,一般建议模型的顶点数应小于255。开启凸包后,模型的凹面处的接触不贴近,这是正常现象,现在的实时技术是将模型用多个凸包组合来解决,如下图所示:
只调整了步长,但未调整步数,这两者需要相互配合才有效果。小技巧是,步数可以随意设置较大的值,步长根据最大的速度值进行调整,值越大,步长应当越小。