Cocos Creator
Constraints
In the physics engine, Constraints are used to simulate connections between objects, such as rods, strings, springs, or ragdolls.
Constraints depend on Rigidbody. If the node does not have a rigidbody component, the engine will automatically add a rigidbody component when adding constraints.
Note: The current constraint only works if the physics engine is selected as Bullet, PhysX or Cannon.js.
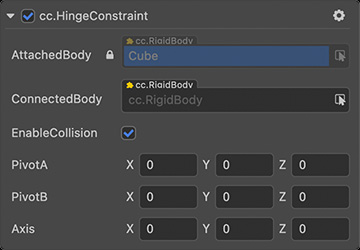
HingeConstraint
Hinge constraints constrain the motion of connected objects to a certain axis. This constraint is useful in situations such as simulating the hinge of a door or the rotation of a motor.
| Properties | Description |
|---|---|
| AttachedBody | Rigid body components under the node where the current constraint is located |
| ConnectedBody | Gets or sets the rigid body to which the constraint is connected, null means it is linked to a static body at the world origin |
| EnableCollision | Gets or sets whether collision is enabled between two bodies connected by a constraint |
| PivotA | Constrain the relative position of a joint in the local space of its own rigid body |
| PivotB | Constrain the relative position of the joint in the local space of the connected rigid body |
| Axis | The axis that constrains constraint rotation in local space |
Please refer to HingeConstraint API for the hinge constraint interface.
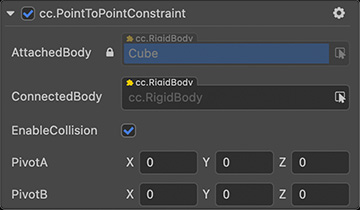
PointToPointConstraint
A point-to-point constraint is a simple composite constraint that connects two objects, or one object, to a point in the coordinate system. The connected objects can be freely rotated with respect to each other while sharing a common connection point.
| Properties | Description |
|---|---|
| AttachedBody | The rigid body to which the collider is attached |
| ConnectedBody | Gets or sets the body to which the constraint is connected |
| EnableCollision | Gets or sets whether collision is enabled between two bodies connected by a constraint |
| PivotA | Constrain the relative position of a joint in the local space of its own rigid body |
| PivotB | Constrain the relative position of the joint in the local space of the connected rigid body |
For point-to-point constraint interface, please refer to PointToPointConstraint API.